Masdika Aliman
Robotics Engineering Student | Soccer Robot Team Member | Tech Enthusiast
Robotics Engineering Student | Soccer Robot Team Member | Tech Enthusiast
Hello! My name is Masdika Aliman, and I am an undergraduate student majoring in Robotics Engineering at Politeknik Negeri Batam. I am an active member of the Middle-Sized League (MSL) Soccer Robot Team at the Barelang Robotics and Artificial Intelligence Laboratory (BRAIL), where I contribute to advanced robotics systems, including localization, object detection, kinematics, control systems, and navigation systems. I am passionate about innovation and applying my skills to solve real-world technical challenges.
Strategy simulation, navigation, kinematics, localization, and object detection in Webots.
Video
URDF models, Nav2 implementation, and simulation in Gazebo.
Video
Create Algorithm, Local minima solution in C++.

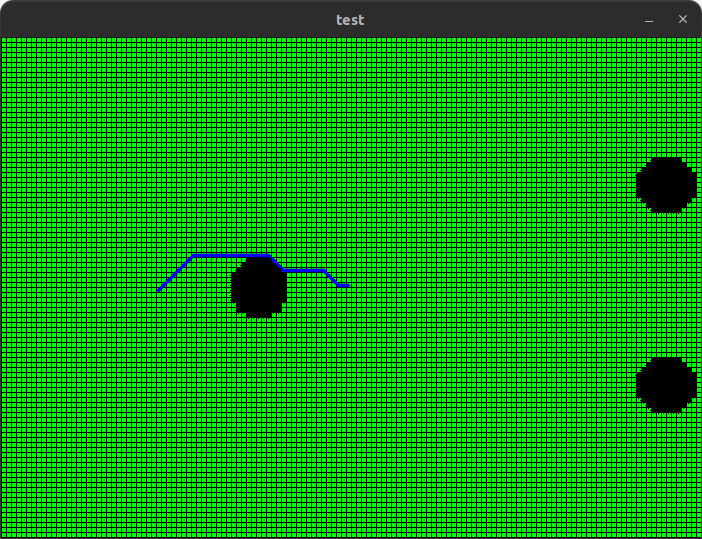
Grid Map, D*, OpenCV.
Programming and operating UR manipulators with real-time control.
Video
EPSON RC+ Programming, Adding Sensor, and Implement Pick and Place.
Video
Diffrential Drive Kinematic,ROS-noetic, Color Segmentation,Simulate in Gazebo.
Video
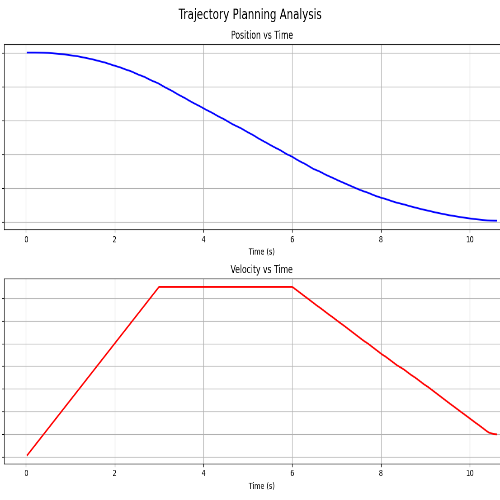
accelaration control to perform smooth motion robot.
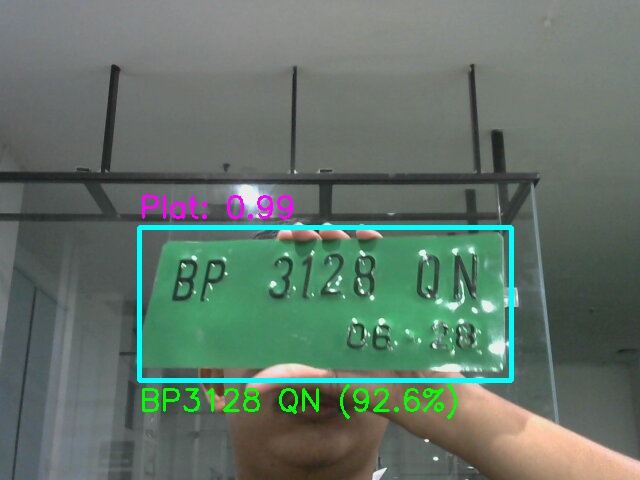
jetson-inference, and PaddleOCR implementation.
Modeled kinematics, PID Controller, Simulated Robot in Webots.
Video
Modeled the kinematic Differential Drive Robot, Implemented Color Segmentation for Object Detection, Build Robot Based ROS-Noetic, Simulated the robot in Gazebo.
Video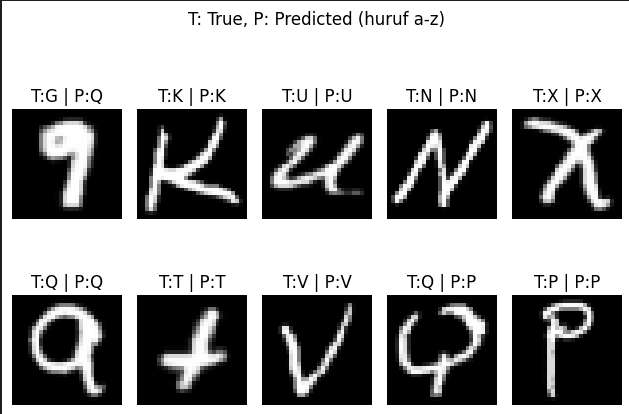
Train and Validate data using python-sklearn, Implement Support Vector Machine.
Video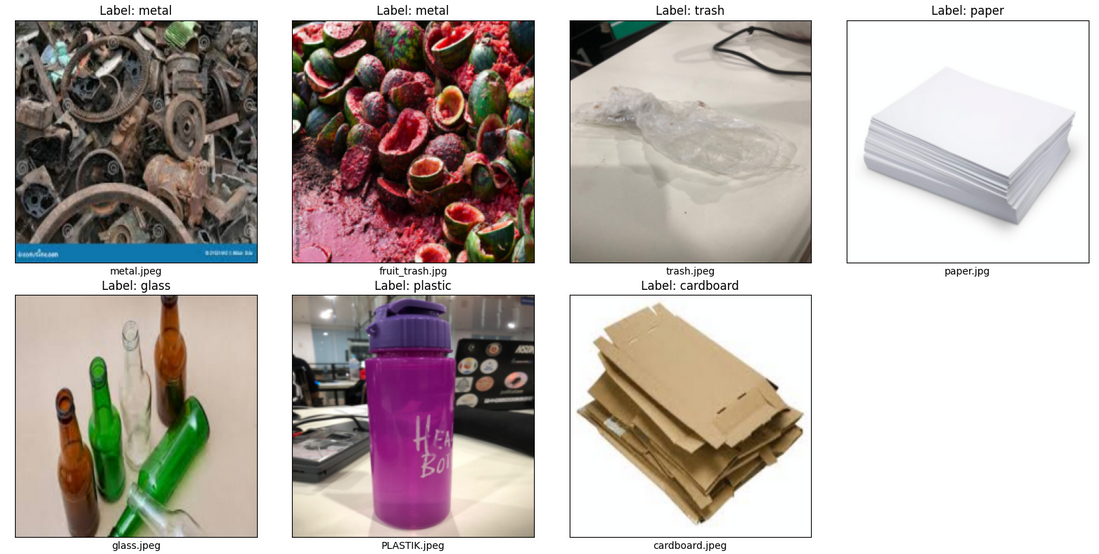
Convolutional Neural Network (CNN), Transfer Learning.
Video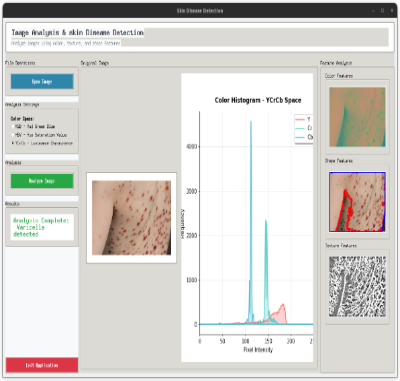
K-Nearest Neighbor (KNN) Algorithm, Image Feature Extraction.
Video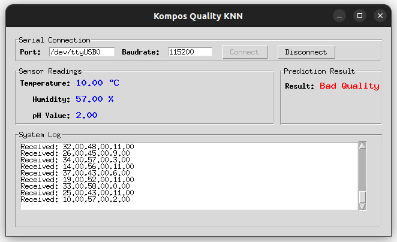
K-Nearest Neighbor (KNN) Algorithm, Feature Engineering and GridSearchCV.
Video